Details about our projects related to bicycle dynamics, handling and control.
- Contents
-
- Project Summary
- Broader Impacts
- Intellectual Merit
- Media
- Project Components
- Human Operator Control
- Physical Parameter Measurement
- Motion Identification Using Motion Capture Techniques
- Instrumented And Actuated Bicycle
- Instrumented Bicycle
- Bicycle Dynamics And Control Software
- System Identification Tools
- Reference Database
- Researchers
- Principal Investigators
- Graduate Students
- Undergraduate Students
- Collaborators
- Funding
- Publications
- Other
- Disclaimer
- Project Summary
Project Summary
The bicycle with a human rider comprises a human-vehicle system whose dynamic behavior is poorly understood. The reasons for this are varied, but include complex kinematic vehicle constraints, tire-roadway interactions, and difficulty in realistically modeling relevant human behavior. In contrast with an automobile or aircraft, the pilot of a bicycle comprises 80%-90% of the overall system mass and thus the motion of the human rider is not negligible. For these reasons, the voluminous research addressing modeling the bicycle over the last century has resulted in few useful design guidelines for the construction of bicycles with desired handling qualities. We believe the key to developing these guidelines lies in understanding the control strategies of the human rider.
The goal of our research is to development of experimentally validated models of both the bicycle and rider with the latter element building upon the established discipline of manual control theory. The bicycle and rider models will be used to establish design methodologies for bicycles that exhibit desirable handling qualities for safe operation. The four elements of our research are the (1) development of dynamic models of the bicycle with rider, (2) development of control-theoretic models of the human bicycle rider, (3) experimental validation of both the bicycle and human operator models, and (4) development of a methodology for prediction of bicycle handling qualities.
Broader impacts
The bicycle can help reduce energy use, improve health, and decrease the environmental impact of personal transportation. For example, studies (Bassett et al., 2008) show inverse correlations between active transportation (including bicycling and walking) and obesity rates in European nations, the United States, Canada, and Australia. In the Netherlands and Denmark, respectively, 18% and 27% of local trips are by bicycle, whereas in the United States bicycles are used for less than 1% (Bassett et al., 2008). Bicycle usage might increase if designers had more insight into their design choices for different populations (e.g. elderly, children, disabled, average adult) and different tasks (e.g. cargo transportation, commuting, recreation). This added insight requires a much greater understanding of rider-bicycle dynamics, interaction, and control.
The bicycle also provides a framework for introducing engineering students to a variety of complex problems in system dynamics and control. These include multi-body dynamics, nonlinear and linear system descriptions, holonomic and nonholonomic constraints, biomechanics, human control, and system simulation and instrumentation. The bicycle is also a vehicle with which the average student is intimately familiar and makes it an ideal educational tool at many levels. For example, Fajans (2000)discusses the concept of steering in bicycles and motorcycles in a journal devoted to the instructional and cultural aspects of physical science. Our research will provide the technical information for educators to introduce the bicycle as a useful and instructive classroom example.
Intellectual merit
In controlling a bicycle, the rider utilizes most all of the sensory feedback information that is necessary for vehicular control in general, i.e., visual, proprioceptive, and vestibular. The utility of visual feedback is obvious. Less apparent is the importance of proprioceptive feedback, i.e., information about limb position, velocity and applied force. Finally, vestibular feedback, information about acceleration and angular velocity, is vital to stable bicycle control and performance. What differentiates the control task of the bicycle rider from that of, say, the automobile driver is the vital nature of all the feedback information just outlined and the fact that the rider/vehicle system must be stabilized while performing a maneuver or path-following task. The study of the human bicycle rider has the potential to significantly increase what is known about human interaction with dynamic systems in an experimental setting that is reasonably tractable and economical. The complex nature of the dynamics of both the human and vehicle make the research endeavor challenging and the expected results of significant use to the engineering community.
Media
Project Components
Human Operator Control
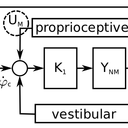 We are developing various human operator control models for the rider/bicycle system. These models attempt to capture the control behavior of what a human senses and actuates to balance and control a bicycle. We are developing various human operator control models for the rider/bicycle system. These models attempt to capture the control behavior of what a human senses and actuates to balance and control a bicycle. |
Physical Parameter Measurement
 To accurately model the bicycle and rider system, the basic physical parameters of the bicycle and the rider must be measured or estimated. These parameters include the geometry, mass, mass locations and mass distribution of all the bodies in the system. Details on our experimental methods can be found here. To accurately model the bicycle and rider system, the basic physical parameters of the bicycle and the rider must be measured or estimated. These parameters include the geometry, mass, mass locations and mass distribution of all the bodies in the system. Details on our experimental methods can be found here. |
Motion Identification Using Motion Capture Techniques
 These experiments were performed to get a better understanding of what body motions humans do while controlling a bicycle. We measured several bicyclists while performing basic riding tasks on a large treadmill. Principal component analysis and other statiscal tools was used to identify motion groups and rider behavior. These experiments were performed to get a better understanding of what body motions humans do while controlling a bicycle. We measured several bicyclists while performing basic riding tasks on a large treadmill. Principal component analysis and other statiscal tools was used to identify motion groups and rider behavior. |
Instrumented and Actuated Bicycle
 We are developing an experimental platform based on an ordinary bicycle that will allow us to measure the dynamics of the bicycle. The bicycle will also have basic automation capabilities that will allow us to test basic controllers for stabilization under various conditions. We are developing an experimental platform based on an ordinary bicycle that will allow us to measure the dynamics of the bicycle. The bicycle will also have basic automation capabilities that will allow us to test basic controllers for stabilization under various conditions. |
Instrumented Bicycle
 We are developing an experimental platform based on an ordinary bicycle that will allow us to measure the dynamics of the bicycle and the dynamics of the rider. We are developing an experimental platform based on an ordinary bicycle that will allow us to measure the dynamics of the bicycle and the dynamics of the rider. |
Bicycle Dynamics and Control Software
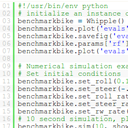 We’ve got some plans to incorporate all of our coding into a coherent and useful piece of software for bicycle dynamics and control analysis. You can find details about the various pieces here. We’ve got some plans to incorporate all of our coding into a coherent and useful piece of software for bicycle dynamics and control analysis. You can find details about the various pieces here. |
System Identification Tools
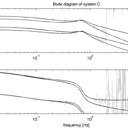 We are working on system identification procedures to experimentally verify the bicycle and rider models. We are working on system identification procedures to experimentally verify the bicycle and rider models. |
Reference Database
|
Citations with keywords and abstracts Citations with keywords, abstracts, reviews and documents (login required, email biosport@ucdavis.edu if you are interested in having access to this database) |
Researchers
Principal Investigators
Dr. Mont Hubbard and Dr. Ronald Hess
Graduate Students
Jason Moore, Dale Peterson, Danique Fintelman, Peter de Lange, Gilbert Gede, Chris Dembia, Brendan Connors
Undergraduate Students
Derek Pell, Joseph Rinek, Eric Chan, Steve Brendel, Steven Yen, Mohammad Osman, Chet Corcos
Collaborators
We are working closely with several other research groups and individuals around the world. These include:
- The Bicycle Dynamics Lab at Delft University of Technology
- Arend Schwab has been leading up bicycle related research at TU Delft for the past several years. His current PhD student, Jodi Kooijman, and him are also working on bicycle research centered around understanding the dynamics, control and handling qualities of bicycles. They have access to a large treadmill at the Vrije Universiteit in Amsterdam and have more recently been doing experimental work using this facility. We have begun to set up an exchange program for students at TU Delft and UC Davis to work in both our labs. More about their research can be found on Arend’s website.
- Bicycle Dynamics Research at Cornell University
-
Andy Ruina and Jim Papadopoulos (co-author of Bicycling Science 3rd Ed.) started researching bicycle dynamics in the mid-eighties at Cornell. They helped solidify the basic dynamic equations of an uncontrolled bicycle and are still actively researching the subject. More information about the work done at Cornell can be found at Andy’s website.
Funding
- National Science Foundation
- This project is primarily being funded by the National Science Foundation under the Dynamic and Control Systems Program: Award #0928339.
We are also generously supported by several sponsors:
- Amped Bikes
- Amped bikes produces conversion kits to electrify bicycles and reguraly donates to research projects and the disabled. They provided us with two hub motor kits so we can set up our experimental bikes with automatic control and to relieve the rider from her pedaling obligations during tests.
- Sunshine Bicycle Center
- Sunshine Bicycle Center is a community oriented bicycle shop located in Fairfax, CA. The have supported us by providing discounted bicycle parts and components.
- UC Davis Bike Barn
- The UC Davis Bike Barn is the closest bicycle shop to our lab (walking distance) and they have helped us out with the use of tools and parts for our experiments.
- Lafayette Laboratories
- Lafayette Labs provides the project with the use of their fabrication lab when the University is on furlough days and it is almost impossible to get any work done.
- Pacific Medical Prosthetics and Orthotics
- Dave Scurti at Pacific Medical has provide materials and advice on the development of the orthotics needed to rigidify the rider. He has a full prosthesis and orthotics fabrication lab and years of experience designing for various needs.
- Anchor Orthotics and Prosthetics
- Renee Vonfeldt gratefully donated a clam shell back brace for use to rigidify the rider.
- Maxim has provided numerous sample level converter IC’s that have been used for prototyping of circuits in the robotic bicycle.
- Microchip has provided sample high speed flash memory IC’s that have been used for prototyping data acquisition storage circuits.
- LSI Computer Systems, Inc.

- LSI has provided us with samples of their SPI enabled quadrature counter (LS7366R). This enables the wheel and steer encoders on the robotic bicycle to seamlessly integrate with the SPI data bus of the Atmel microcontroller and provide high speed and low latency measurement of wheel and steer angles.
Publications
- [Moore et al., 2011]
- Moore, J., Kooijman, J., Schwab, A., and Hubbard, M. (2011). Rider motion identification during normal bicycling by means of principal component analysis. Multibody System Dynamics, 25:225–244. 10.1007/s11044-010-9225-8. [ bib | http ]
- [Moore et al., 2010a]
- Moore, J. K., Hubbard, M., Peterson, D. L., Schwab, A. L., and Kooijman, J. D. G. (2010a). An accurate method of measuring and comparing a bicycle’s physical parameters. In Bicycle and Motorcycle Dynamics: Symposium on the Dynamics and Control of Single Track Vehicles, Delft, Netherlands. [ bib ]
- [Moore et al., 2010b]
- Moore, J. K., Hubbard, M., Schwab, A. L., Kooijman, J. D. G., and Peterson, D. L. (2010b). Statistics of bicycle rider motion. Procedia Engineering, 2(2):2937–2942. The Engineering of Sport 8 – Engineering Emotion. [ DOI | bib | http ]
- [Peterson et al., 2010]
- Peterson, D. L., Moore, J. K., Fintelman, D., and Hubbard, M. (2010). Low-power, modular, wireless dynamic measurement of bicycle motion. Procedia Engineering, 2(2):2949–2954. The Engineering of Sport 8 – Engineering Emotion. [ DOI | bib | http ]
- [Peterson and Hubbard, 2009]
- Peterson, D. L. and Hubbard, M. (2009). General Steady Turning of a Benchmark Bicycle Model. InProceedings of IDETC/MSNDC 2009 the ASME 2009 International Design Engineering Technical Conferences & 7th International Conference on Multibody Systems, Nonlinear Dynamics, and Control, number DETC2009/MSNDC-86145. [ bib ]
- [Moore et al., 2009b]
- Moore, J. K., Kooijman, J. D. G., and Schwab, A. L. (2009b). Rider motion identification during normal bicycling by means of principal component analysis. In Arczewski, K. and J. Fraczek, M. W., editors, Multibody Dynamics 2009, ECCOMAS Thematic Conference, Warsaw, Poland. [ bib ]
- [Kooijman et al., 2009]
- Kooijman, J. D. G., Schwab, A. L., and Moore, J. K. (2009). Some observations on human control of a bicycle. In Proceedings of the ASME 2009 International Design and Engineering Technical Conferences & Computers and Information in Engineering Conference. [ bib ]
- [Moore et al., 2009a]
- Moore, J. K., Kooijman, J. D. G., Hubbard, M., and Schwab, A. L. (2009a). A Method for Estimating Physical Properties of a Combined Bicycle and Rider. In Proceedings of the ASME 2009 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, IDETC/CIE 2009, San Diego, CA, USA. ASME. [ bib ]
- [Connors, 2009]
- Connors, B. (2009). Modeling and stability analysis of a recumbent bicycle with oscillating leg masses. Master’s thesis, University of California, Davis. [ bib ]
- [Connors and Hubbard, 2008]
- Connors, B. and Hubbard, M. (2008). Modelling and Stability Analysis of a Recumbent Bicycle with Oscillating Leg Masses. In Estivalet, M. and Brisson, P., editors, The Engineering of Sport 7, volume 1, pages 677–685. ISEA, Springer Paris. [ DOI | bib ]
- [Peterson and Hubbard, 2008a]
- Peterson, D. L. and Hubbard, M. (2008a). Analysis of the Holonomic Constraint in the Whipple Bicycle Model, Paper 267. In The Engineering of Sport 7, volume 2, pages 623–631, Biarritz, France. ISEA, Springer. [ bib ]
- [Peterson and Hubbard, 2008b]
- Peterson, D. L. and Hubbard, M. (2008b). Yaw rate and velocity tracking control of a hands-free bicycle. In International Mechanical Engineering Congress and Exposition, Boston. ASME. [ bib ]
- [Moore et al., 2007]
- Moore, J. K., Peterson, D. L., and Hubbard, M. (2007). Influence of rider dynamics on the Whipple bicycle model. In 11th International Symposium on Computer Simulation in Biomechanics, Tainan, Taiwan. ISB. [ bib ]
- [de Lorenzo and Hubbard, 1996]
- de Lorenzo, D. S. and Hubbard, M. (1996). Dynamic Bicycle Stability of a Flexibly Coupled Rider. Internal report UC Davis. [ bib ]
Other
Disclaimer
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.